 憑永磁體激勵嘅兩極直流電機
憑永磁體激勵嘅兩極直流電機
直流電機,又叫做換向器電機,係一種用乾電行或者產生乾電嘅旋轉電機。根據個功率流係入定出又分別叫做直流電動機同埋直流發電機,但理論上同埋有時候直流電機可以兼用做電動機同發電機。直流電動機嘅特點係佢可以帶好高嘅負載啟動,而且一般嚟講負載稍微變動嗰陣時個轉速變動好細,不過佢直接啟動嗰陣時嘅啟動電流好大。
經典直流電機嘅特徵係有一套由電刷同埋換向器構成嘅機械換流器。個換向器係由好多換向片疊埋並鬭埋絕緣嘅雲母片組成嘅,對於電動機就令到轉動過程中個電流方向可以適時改變嚟保證轉動可以持續落去,即外部嘅乾電就可以變成轉子唔同箍當中隨轉隨往復變化嘅濕電(變流過程);或者反之,對於發電機就令到最終輸出嘅電流方向穩定(整流過程)。
除開經典嘅直流電機之外,仲有啲冇電刷或者機械變流器嘅電機又係使乾電嘅,譬如單極電機(德文:Unipolarmaschine)或者直流無刷電機(BLDCM)。邇啲電機一般都另開討論。
 歷史上(約1880年)嘅直流電機,屬Zénobe Gramme
歷史上(約1880年)嘅直流電機,屬Zénobe Gramme
 工業用直流電動機嘅剖面模型
工業用直流電動機嘅剖面模型
同其他電機一樣,直流電機都由三個主要部分鬭成:定子、轉子同埋佢哋之間嘅氣罅。
定子即電機嘅固定部分,包括激磁嘅主磁極、固定磁極同埋導磁嘅機座同埋電刷裝置,構成空心圓柱式嘅軛;喺大啲嘅電機仲有埋改良換向性能嘅換向極。定子並咪疊做嘅,之係由成䊆材料做成嘅,因為入邊冇交變磁場,所以唔會有渦流。主磁通就由一係主磁極芯承載住嘅主磁極或者激磁繑組,一係永磁電機使嘅永磁體產生。喺大型機器中,仲會有用於消除磁場畸變嘅補償繑組喺極靴入邊。
電刷由導電性良好、唔容易磨損嘅材料製成。通常係自潤滑石墨,有時會戥銅粉混合,睇碳刷(德文:Kohlebürste);對於細型電機,譬如盒式磁帶,都會有貴金屬電刷)。
轉子即電機轉得嘅部分,常規電機情況下又喊做電樞。佢包括電樞芯、電樞繑組同埋換向器。轉子係疊做嘅,噉樣可以減少由於磁性往復反轉而導致嘅渦流損耗。大多數直流電機設計係內轉型:轉子喺內部,定子喺外部。都有電機係外轉型。
 滾筒電樞
滾筒電樞
 滾筒電樞嘅換向器、波形繑組同埋磁場嘅展開圖
滾筒電樞嘅換向器、波形繑組同埋磁場嘅展開圖
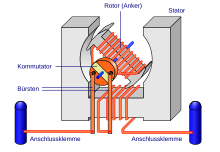
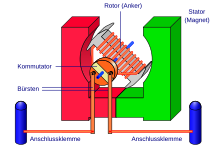 永磁直流電機嘅運行示意圖
永磁直流電機嘅運行示意圖
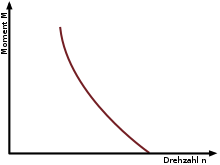
 恆定電壓下串激電機嘅轉矩-轉速特徵曲線
恆定電壓下串激電機嘅轉矩-轉速特徵曲線
 串激馬達工作原理
串激馬達工作原理
 串激馬達內部駁線
串激馬達內部駁線
 恆定電壓下並激電機嘅轉矩-轉速特徵曲線
恆定電壓下並激電機嘅轉矩-轉速特徵曲線
 並激電機工作原理
並激電機工作原理
 並激馬達內部駁線
並激馬達內部駁線
 恆定電壓下複激電機嘅轉矩-轉速特徵曲線
恆定電壓下複激電機嘅轉矩-轉速特徵曲線
 Maxon馬達股份公司嘅鐘形電樞電機個轉子,由平行嘅纖紡繑組同埋邊上灰色嘅注入物組成,後者用於找平重量
Maxon馬達股份公司嘅鐘形電樞電機個轉子,由平行嘅纖紡繑組同埋邊上灰色嘅注入物組成,後者用於找平重量
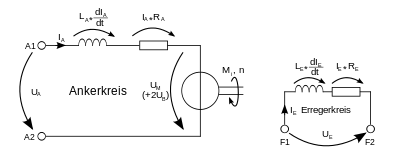 電樞繑組(左)同激磁繑組(右)嘅等效電路,其中中間表示電機感應部分,即電能-機械能轉換部分
電樞繑組(左)同激磁繑組(右)嘅等效電路,其中中間表示電機感應部分,即電能-機械能轉換部分
以外激直流電機作例,根據電路可以有公式:
 (電樞電路)
(電樞電路) (激磁電路)
(激磁電路) 抑或係
抑或係 (電動勢表示式)
(電動勢表示式)
其中
 係電樞電壓,
係電樞電壓, 係激磁電壓,
係激磁電壓, 係感應電動勢,
係感應電動勢, 係機械常數,
係機械常數, 係主磁通。
係主磁通。
根據電磁感應,有:
 (轉矩表示式、轉矩-電樞電流式)
(轉矩表示式、轉矩-電樞電流式)
若果根據用電器耗能制定啲參數嘅正負方向嘅話(即消耗型箭頭系統(Verbraucherzählpfeil-system),似歐姆定律入邊假定嘅),對於電樞電路同埋個電動勢,就有:

電流穩定陣時 ,有:
,有:

考慮埋電機感應定律有:

 外激直流電機嘅工作區域:左邊係電樞調整區域,右邊係弱磁調整區域,可以睇到透過弱磁提升轉速比n/nN嗰陣時轉矩M會跟住下降
外激直流電機嘅工作區域:左邊係電樞調整區域,右邊係弱磁調整區域,可以睇到透過弱磁提升轉速比n/nN嗰陣時轉矩M會跟住下降
邇條式可以睇作係直流電機電樞電壓-磁通-轉速式,佢含義係:對於穩定嘅 ,考慮到:
,考慮到:
- 實際上電樞繑組個銅阻
 非常之細;
非常之細;
:或者
- 空轉情況下根據轉矩-電樞電流式,需要提供嘅轉矩非常之細(衹有空阻),所以
 非常之細
非常之細
個 就接近於零,即感應電動勢
就接近於零,即感應電動勢 幾乎等同於電樞電壓。噉可以話個喺穩定嘅磁通
幾乎等同於電樞電壓。噉可以話個喺穩定嘅磁通 之下幾乎跟轉速n成正比。 喺
之下幾乎跟轉速n成正比。 喺 邇個範圍(電樞調整區)個轉速n就係噉樣使電樞電壓嚟操縱。對於啱好
邇個範圍(電樞調整區)個轉速n就係噉樣使電樞電壓嚟操縱。對於啱好 同埋
同埋 嗰陣就係特徵點(Typenpunk)。超過佢就衹能穩定,嗰陣時仲要提升轉速n就唯有靠減少激磁繑組電流,嚟減少磁通(弱磁調整區)。邇種情況下再考慮到轉矩-電樞電流式,減少磁通邇個行為係有局限嘅:磁通減少嗰陣時,同樣嘅電樞電流下由於洛倫茨力嘅減少,台機就按照個比例衹提供得更加細嘅轉矩。一係個好快下降(譬如激磁電路斷線)但電樞電壓冇變,由於個磁路入邊仲係會有剩磁(見磁滯回線),空負載或者輕載嗰陣就會導致轉速n飆升(飛車現象)同埋風阻驟大、甚至整壞電樞;帶重載嗰陣就會因為轉矩唔夠而慢慢噉停車。
嗰陣就係特徵點(Typenpunk)。超過佢就衹能穩定,嗰陣時仲要提升轉速n就唯有靠減少激磁繑組電流,嚟減少磁通(弱磁調整區)。邇種情況下再考慮到轉矩-電樞電流式,減少磁通邇個行為係有局限嘅:磁通減少嗰陣時,同樣嘅電樞電流下由於洛倫茨力嘅減少,台機就按照個比例衹提供得更加細嘅轉矩。一係個好快下降(譬如激磁電路斷線)但電樞電壓冇變,由於個磁路入邊仲係會有剩磁(見磁滯回線),空負載或者輕載嗰陣就會導致轉速n飆升(飛車現象)同埋風阻驟大、甚至整壞電樞;帶重載嗰陣就會因為轉矩唔夠而慢慢噉停車。
對於(外)激磁部份,有:


其中
 係電樞電壓,
係電樞電壓, 係電樞電流,
係電樞電流, 係電樞繑組電阻,
係電樞繑組電阻, 係電樞繑組電感;
係電樞繑組電感; 係激磁電壓,
係激磁電壓, 係激磁電流,
係激磁電流, 係激磁繑組電阻,
係激磁繑組電阻, 係激磁繑組電感,
係激磁繑組電感, 係佢嘅紮數;
係佢嘅紮數;
激磁迴路未飽和陣時,個機械運動方程係:


其中
 係轉子嘅轉動慣量,
係轉子嘅轉動慣量, 係轉子嘅角加速度,
係轉子嘅角加速度, 係轉子嘅角速度;
係轉子嘅角速度; 係總共嘅負載轉矩。
係總共嘅負載轉矩。 代表所謂嘅機械常數。
代表所謂嘅機械常數。
對於串激電機嚟講,個 都會同時由
都會同時由 決定,即
決定,即 ;噉樣可以改寫電動勢表示式同埋轉矩表示式,得:
;噉樣可以改寫電動勢表示式同埋轉矩表示式,得:


若果係線性函數,可以進一步簡化:


用新嘅常數嚟表示,得:




.gif)














